Intersection of subspaces¶
Lemma 3.19 (Related exercises: Exercise 4.46, Exercise 3.16, Exercise 3.28)
Let \(V\) be a vector space and \(A, B \subset V\) be two subspaces. Then the intersection
is also a subspace of \(V\). More generally, this holds true for any number of subspaces, i.e., if \(A_1, A_2 \dots, A_n \subset V\) are subspaces, then so is their joint intersection
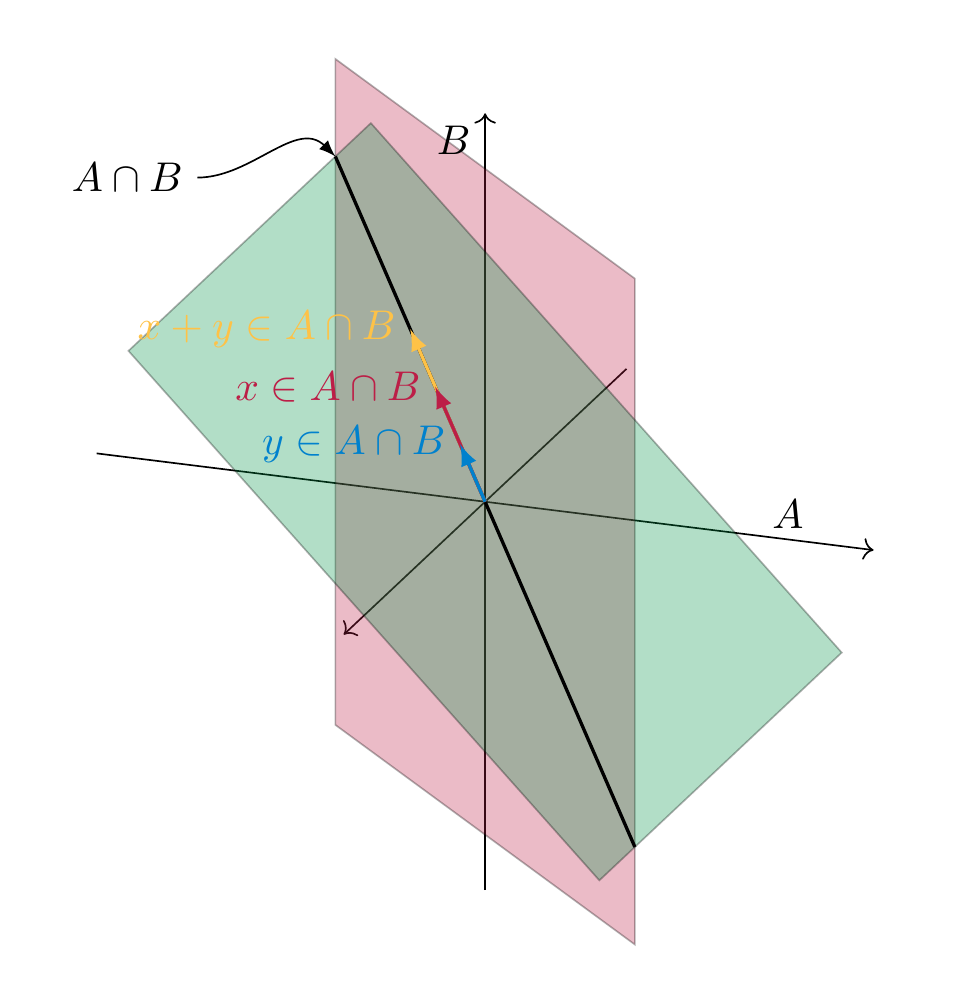
Proof. We need to make sure that \(A \cap B\) satisfies the conditions in Definition 3.17. This is easy enough. For example, the zero vector \(0 \in A \cap B\) since \(0 \in A\) (since \(A\) is a subspace) and also \(0 \in B\) (since \(B\) is also a subspace). Here is a visualization for sums: if \(x, y \in A \cap B\), then \(x + y \in A \cap B\) since it is both contained in \(A\) and also in \(B\).
◻
Intersections of subspaces are hugely important to us because of the following example.
Example 3.20
Consider once again a homogenous system as in Equation (3.14). Then, of course, each individual equation of that system is in its own right a homogeneous linear equation, for example
By the above, the solution set of that equation is a subspace of \({\bf R}^n\), that we denote by \(S_1 (\subset {\bf R}^n)\). Likewise this is true for all the other individual equations, so we get some subspaces \(S_1, \dots, S_m\), one for each equation. The solution set of the whole system is then just
(Indeed, a vector \((r_1, \dots, r_n) \in {\bf R}^n\) is a solution for the whole system precisely if it is one for the individual equations.)
An important question that we will eventually be able to make more precise and to answer is this:
Question 3.21
Given two subspaces \(A, B\) in some vector space \(V\), how “much smaller” can \(A \cap B\) be than \(A\) and \(B\)?
In the above illustration, we will want to articulate the idea that the ambient vector space \(V\) is “3-dimensional”, \(A\) and \(B\) are 2-dimensional (i.e., a plane) and \(A \cap B\) is 1-dimensional (i.e., a line). Note that this need not be the case: if \(A = B\) is the same plane, for example, then certainly \(A \cap B = A\) is also 2-dimensional. This relates to the discussion about the intersections of lines in \({\bf R}^2\) in Summary 2.12: if \(A, B \subset {\bf R}^2\) are “1-dimensional” (i.e., lines), their intersection may still be a line, namely if \(A = B\). If the ambient vector space \(V\) is even larger, for example \(V = {\bf R}^4\) (which has “dimension 4”), then it is no longer reasonable to write down all possible constellations of how \(A, B\) lie in \(V\).